Calibrating a DVL Sensor
Definition and Recommendations
DVL calibration means estimation of mechanical misalignments (Heading / Pitch) and estimation of scale factor.


Better results are obtained when the range to bottom is constant. This parameter can be displayed into the DVL_BT channel with ‘altitude’:
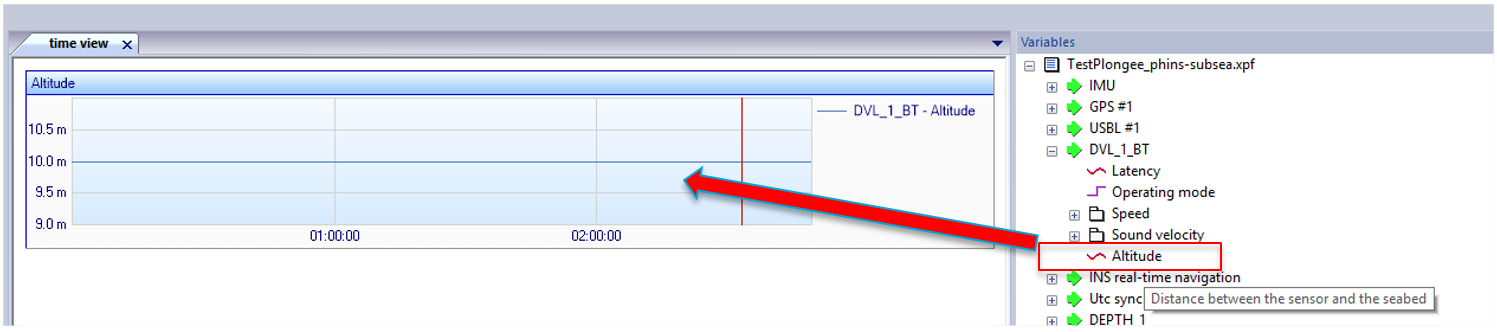
If it is not the case, the user may select a time window where it is the case in order to activate the calibration at this period.

Procedure
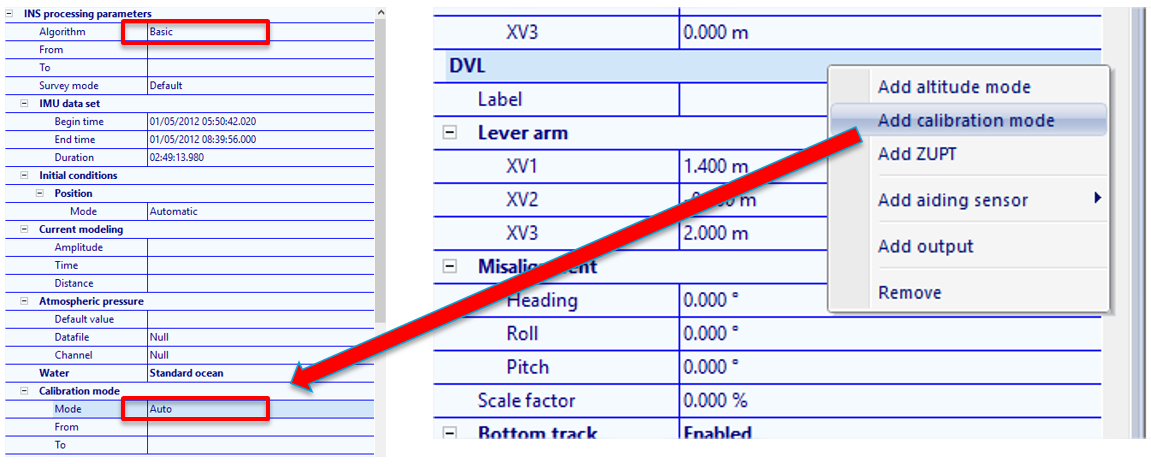
| 1. | In INS processing parameters, set the Algorithm to Basic and set the Calibration Mode on Auto: |
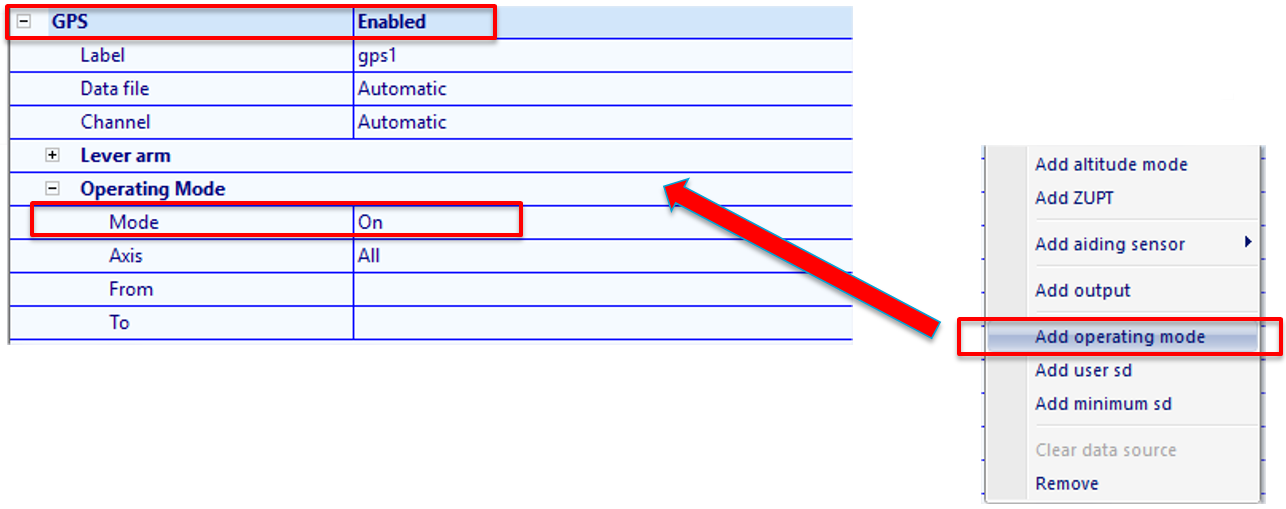
| 2. | An absolute reference is required to be activated: |
| 3. | Start the calibration process to be launched in Basic mode. |

| 4. | Find below the parameters to be displayed and controlled (a channel is created with calibration computation): |
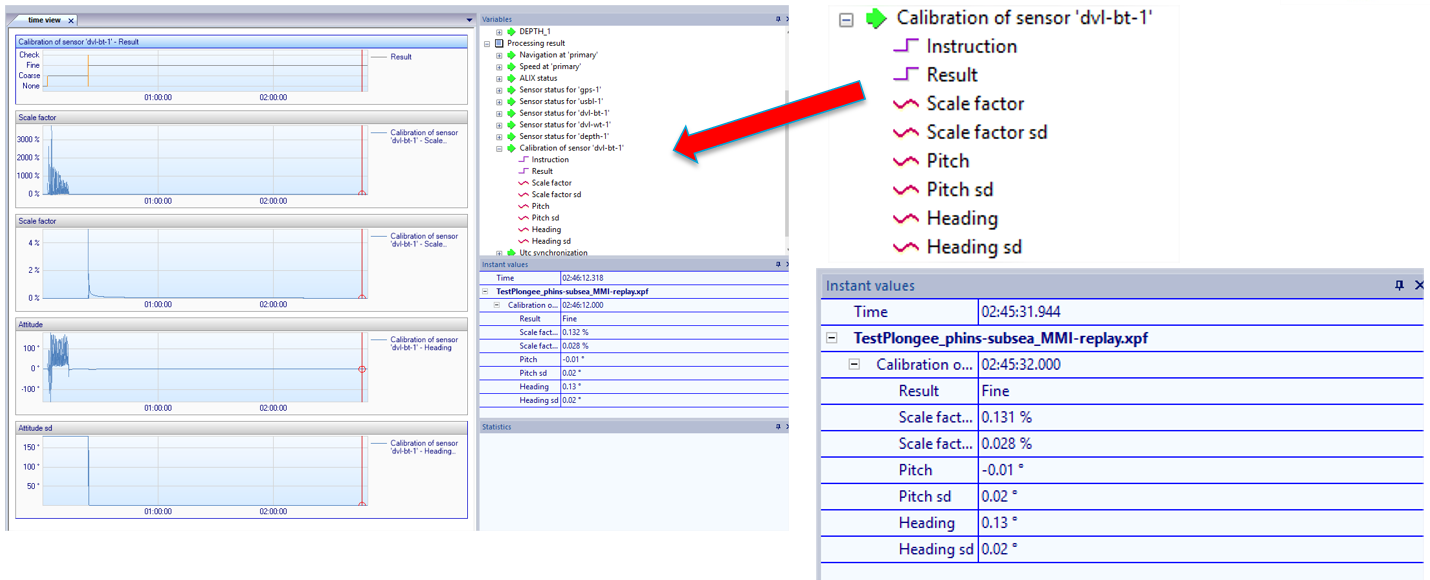
| 5. | Look at the stability of the estimation and the SD value for each parameter computed. |
SF/Heading/Pich AND SF sd / Heading sd / Pitch Sd
Check also that the calibration is switching from None / Coarse and then fine (result channel).
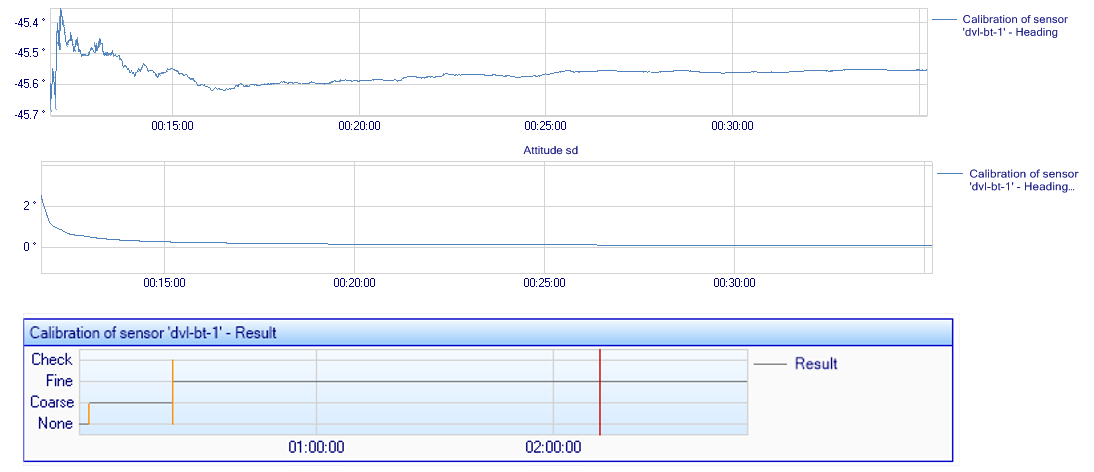
| 6. | Check also that the calibration is switching from None / Coarse and then fine (result channel). |

| 7. | Read the final values on the Instant values window. These values may be used as new parameters. |


|
If the calibration results are ok, it switches from coarse to fine, and Scale Factor Error heading errorestimation converge to a stable value.The calibration is declared OK when the Scale Factor SD error AND Heading SD error goes under 0.1% and 0.1°. |
DVL Calibration Troubleshooting
|
Event |
Action |
|
DVL calibration stays to ‘coarse’ |
Check if the INS is already on fine alignment before the calibration or if altitude mode is maintained by depth or GPS. |
|
DVL calibration goes to ‘fine’ but doesn’t converge |
Check if the INS receives DVL Bottomtrack data during the whole calibration and has several GPS fixes at the end of calibration. |
|
DVL calibration is too long |
Tighten the DVL SD to 0.05 m/s, but check if neither GPS or DVL will not be rejected by INS. |
|
DVL calibration converge but scale factor error is too high (+/- 0.5%) |
Check if the INS has a SVS/SVP input sensor. |
|
DVL calibration converge but to an unsual heading error, above +/-1° from [0° + n*90°] or [45° +n*90°] with n=0;1;2;3 |
Check how the DVL is mechanically mounted accordingly to the INS. |